




资讯详情
三菱伺服MR-J4-RJ全闭环控制使用方法
全闭环控制一般应用于精度要求极高的场合,行业上做全闭环控制主要有两种,一种是利用PLC的高速计数器记录机械端编码器反馈脉冲,然后与目标值进行比较,当达到目标位置时停止PLC发脉冲。但这种方法的缺点是受程序扫描周期影响,当伺服电机转速很快的时候,会出现定位过冲的情况。第二种方法是使用全闭环型伺服,以机械端编码器为单位,利用伺服自动比较功能进行定位控制。下面,以MR-J4-RJ伺服为例讲解第二种全闭环控制的实现方法。
n 全闭环控制模型
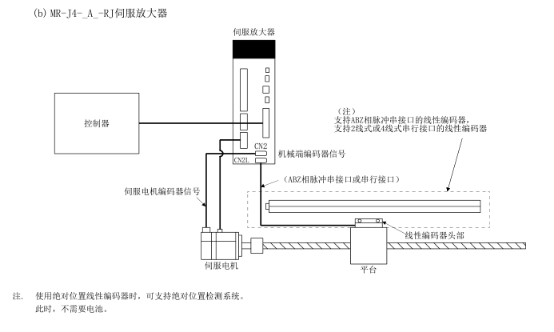
n 编码器接线
伺服驱动器的CN2端接伺服电机编码器线,CN2L接机械端编码器线。机械端编码器线具体接线方法视编码器类型而不同。
n 全闭环控制主要参数设置
伺服参数除了需要设置常规参数外,还需要设置以下全闭环系统参数。
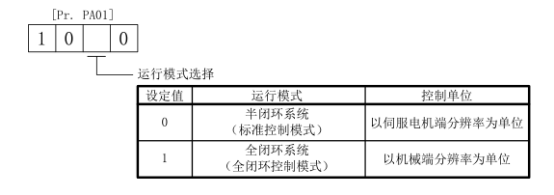
1、运行模式选择
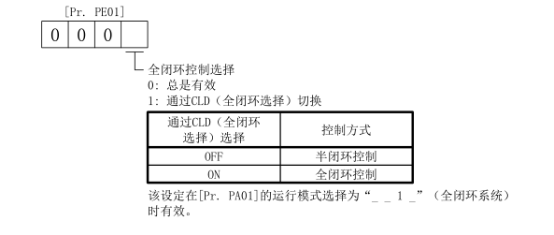
2、半闭环/全闭环控制选择
3、机械端编码器通讯方式选择

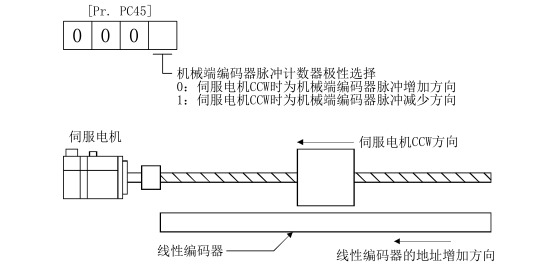
4、机械端编码器极性设定
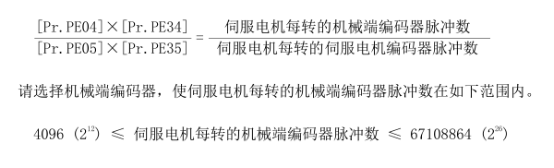
5、反馈脉冲电子齿轮设定
以上为三菱伺服MR-J4-RJ全闭环控制的参数设置。